If you want to download the full thesis click here. If you want to have also the scripts used for calibration and trajectory estimation just email me.
Autonomous underwater vehicles (AUVs) are an essential tool for exploring the vast and complex ocean environment. These vehicles can perform various tasks, such as oceanographic surveys, environmental monitoring, and search and rescue operations. However, the success of these tasks depends on the vehicle's ability to navigate autonomously and accurately in the underwater environment.
Simultaneous localization and mapping (SLAM) is a popular navigation technique that uses onboard sensors to create a map of the vehicle's surroundings and estimate its position relative to the map. However, the accuracy of SLAM is affected by various factors, such as sensor noise, environmental conditions, and the presence of obstacles. Thus, there is a need to develop robust SLAM algorithms that can handle these challenges.
My bachelor thesis focuses on the calibration process of stereo cameras for underwater autonomous navigation. It consists of the following key elements:
- chapter 1 provides a brief introduction to Autonomous Underwater Vehicles (AUVs) and highlights the significance of stereo cameras in maritime environments. Emphasis is placed on the importance of camera calibration in the context of underwater autonomous navigation;
- chapter 2 explains the process of performing a simple monocular calibration. This serves as a fundamental step in understanding stereo calibration;
- chapter 3 explores the reconstruction of a 3D scene using two identical cameras that have already been calibrated. This chapter outlines the methodology and steps involved in achieving accurate 3D reconstruction;
- chapter 4 focuses on reconstructing a 3D scene using two identical cameras that are not calibrated. The objective is to calibrate these cameras and follow the steps described in Chapter 3 for accurate reconstruction;
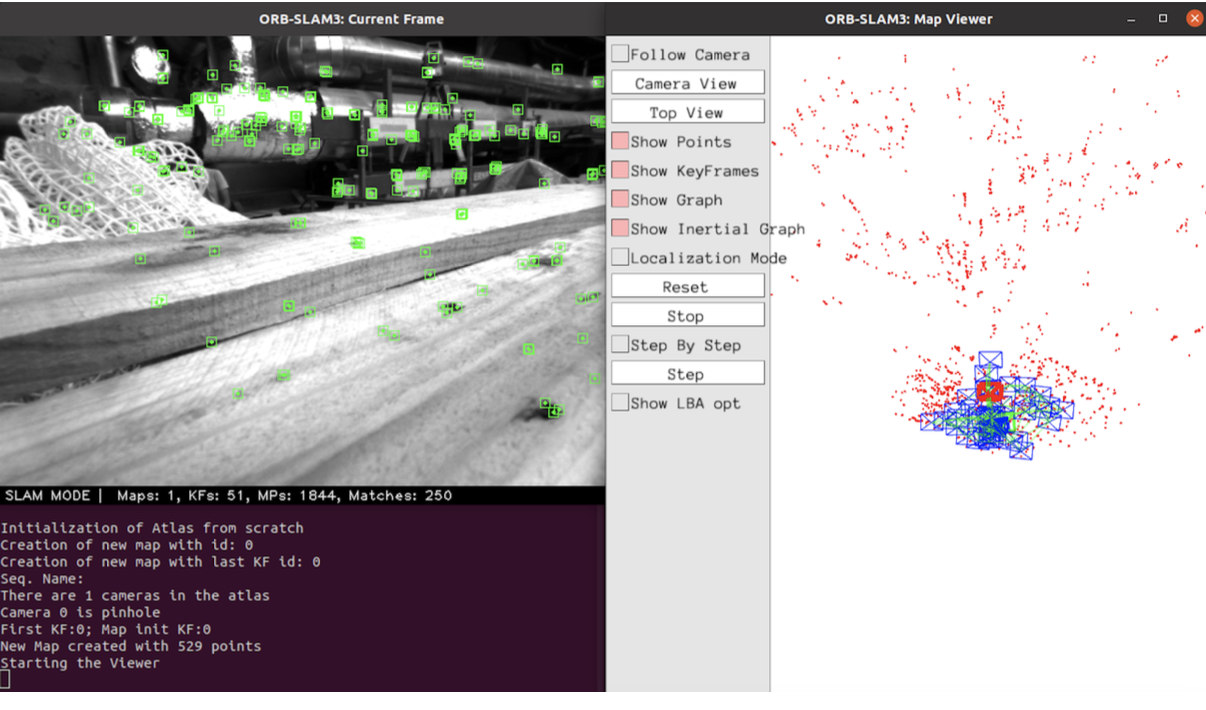
- chapter 5 focuses on explaining the code for stereo reconstruction, the installation of a docker-version of ORB-SLAM3 and how to perform a trajectory estimation using Python.
The research will continue on improving the accuracy and reliability of the stereo calibration in the underwater environment and evaluating their performance through simulations and field experiments.
Acknowledgments
This thesis owes its success to the invaluable support of my supervisors Paolo Lino and Nikolai Svishchev, as well as the contributions of my colleague Amalia.